
www.engineering-china.com
16
'21
Written on Modified on
箱中取物更加容易
“随机容器内取物”是自动化领域中最难的学科之一。通过设置参数来可靠地识别和抓取通常无序摆放的物体是一项艰巨的任务,需要大量的专业知识。而肯普滕的 Liebherr-Verzahntechnik GmbH 出品的专业软件 LHRobotics.Vision 现在利用人工智能 (AI) 为用户显著简化了箱中取物操作。

箱中取物在自动化中起着越来越重要的作用。“随机容器内取物”是最困难的任务之一:机械手必须识别不同的、甚至是混乱排列的、有时具有复杂几何形状的物体,将它们从容器中移出而不发生碰撞,放入定向位置并传递给机器。调整部件、箱子和夹具之间的协作需要操作人员具有丰富的经验和充分的专业知识。
挑战箱中取物
因此,对用户来说,实施箱中取物解决方案是一项重大的技术挑战。如果没有系统制造商或集成商的支持,大多数情况下将无法进行。但是,如果系统具有学习能力,能够在设置时甚至在运行过程中独立调整参数,又是怎样的情况呢?作为自动化解决方案的领先制造商,Liebherr-Verzahntechnik GmbH 已经解决了这个问题,并正在进一步开发自己的 LHRobotics.Vision 软件。该软件通过人工智能 (AI) 显著简化了操作人员的参数设置工作。“我们想要实现‘人人皆可进行箱中取物’”,Liebherr 柔性制造系统和自动化系统的销售经理 Jürgen Groß 总结了项目目标。
Liebherr 作为具有集成式箱中取物软件的完整机械手单元的制造商而闻名于世。2020 年,这家位于肯普滕的企业决定将该软件作为独立产品供应。这意味着它也可以用于其他制造商的系统——这对于最终用户和集成商都极具吸引力。
LHRobotics.Vision 工艺包
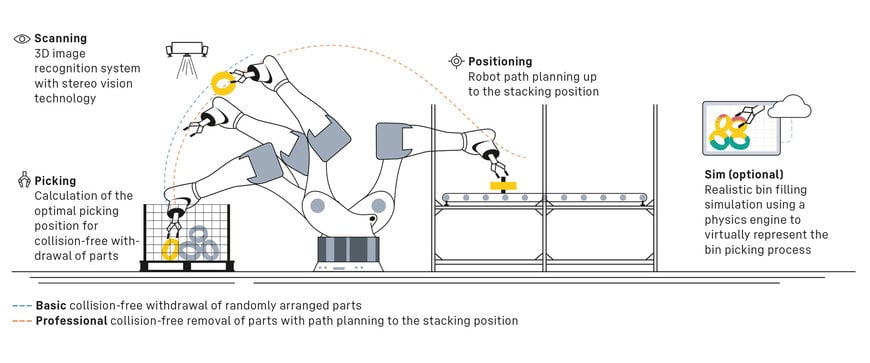
该技术包除了包含图形引导的、可直观操作的软件外,还包括一个基于投影仪的 3D 摄像头系统。这样就可以通过评估三维立体视觉图像来实现面向物体的图像识别。由部件的三维数据和真实箱体的干扰轮廓生成一个点云,作为无碰撞提取部件的轨迹规划基础。可以轻松地在软件中以图形方式确定部件上所需的抓取点,而无需对机械手进行复杂的示教。
一个特殊功能是可选的模拟工具 LHRobotics.Vision Sim。借助物理引擎模拟箱子填装,然后生成一个虚拟点云并进行评估。这使得用户能够以纯虚拟的方式调整夹具的几何形状并优化流程,以实现更好的清空程度,甚至是更深的箱子——没有风险,也无需昂贵的测试硬件投资。
AI 正在进入系统
LHRobotics.Vison 软件的新版本计划于 2021 年 9 月发布。通过人工智能和机器学习实现了在箱中取物过程中自动竖起新部件,这是该技术的一次巨大飞跃。其中,系统在真实扫描数据的基础上计算部件的几何参数并分析传感器的分辨率和噪音行为。然后根据这些扫描数据生成测试测量,以借此确定最佳设置参数。这简化了流程并节省了时间和成本。通过在竖起过程中对每一次扫描进行自我训练,该系统为下一步奠定了基础:在持续运行中进行机器学习。
注定用于电动汽车应用
“许多用户今天仍然对箱中取物望而却步,因为据说它是如此复杂,仿佛在内部搭建了一个建筑工地。借助新的软件版本,我们现在可以消除用户和集成商的这种担忧”,Jürgen Groß 这样说道并继续解释:“我们将整个行业的范式转换也视为机遇:由于汽车行业的动荡以及向电动汽车应用的转变,我们必须面对新的挑战。”
因此,Liebherr 现在已经在视觉系统上建立了人工智能,用于实现柔性电缆连接的过程安全和自动对接,例如电动汽车电池组的模块连接器。电动汽车带来的变化不仅影响到动力总成,而且也使车身越来越多地采用轻质结构制造。在这一方面,Liebherr 也成功地使用 LHRobotics.Vision 拣选和卸载板材部件。
“未来,越来越复杂的零件几何形状和状态将对箱中取物构成巨大挑战。人工智能是一项关键技术,如果没有它,这些要求几乎无法得到满足”,Jürgen Groß 说道。“Liebherr 熟悉用户方面的情况,并在整个流程中发挥职能。这使我们成为行业的真正合作伙伴,也为未来的发展做好了充分的准备”,他最后总结到。
物理引擎:物理引擎是一种模拟程序,用于在虚拟世界中为物体相互作用和碰撞建模。其中考虑到了诸如重力、弹性、摩擦和碰撞物体之间的动量守恒等参数。
www.liebherr.com
