
www.engineering-china.com
17
'26
Written on Modified on
施迈茨推出 mGrip Basic 手指气动抓手,实现柔性工件搬送
全新的 mGrip Basic 和 SRCU Basic 控制模块,让食品、包装及物流领域的异形、易碎工件的自动化搬送变得更加简单且经济。
www.schmalz.com
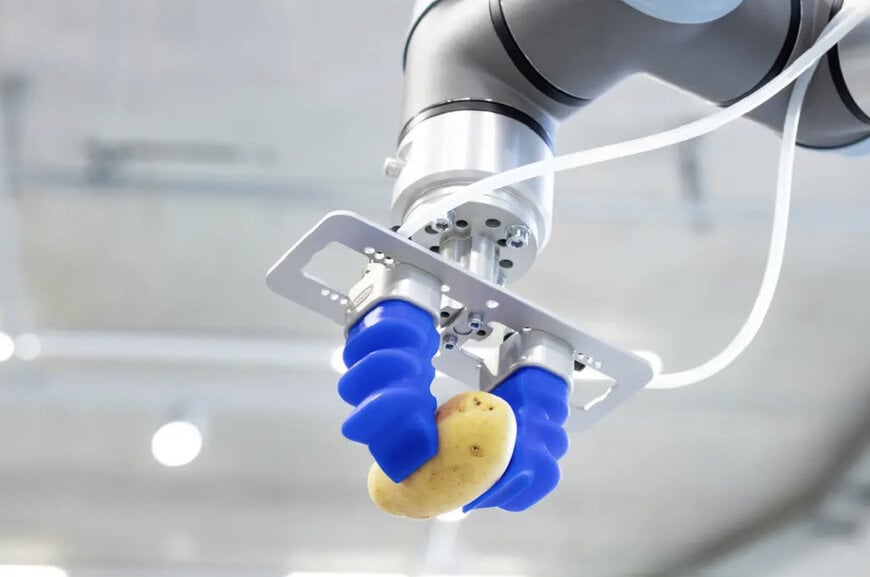
施迈茨株式会社(Schmalz)推出了气动手指抓手及专用控制模块,旨在提升数字化供应链中异形及易碎产品的自动化搬送性能。
构建应对多品种变动生产的数字化供应链
在食品加工、农业、包装和物流领域的自动化流程中,搬送形状不规则且易碎的工件一直是一大挑战。全新的气动搬送系统通过无损且高速地移动这些异形物品,优化了自动化投资的回报率(ROI),并提高了整个数字化供应链的流通效率。它能可靠地抓取传统金属机械抓手无法处理的吸塑包装、网袋包装及农产品等,从而将传统的手动分拣工序平稳过渡到自动化流水线上。
该系统的目标工件包括烘焙糕点、乳制品、水果等表面脆弱的物品。由于弹性体手指模块能够紧密贴合工件的轮廓,因此可以防止局部应力集中,在搬送过程中保持高质量作业,不会在产品上留下伤痕或变形痕迹。

模块化设计缩短换产时间并简化系统集成
该抓取机构采用了模块化结构,其设计旨在最大程度地缩短因生产线变更而导致的治具更换时间。通过调整内部的安装部件,无需更换整个抓手基板,即可快速改变手指模块的排列位置和相对距离。
- 快速硬件配置变更:可根据工件尺寸和重量的变化来调整手指的数量和间距,从而在多品种混线生产的流水线上有效抑制换产成本。
- 坚固的压力控制系统:专用控制模块内置了手动调压手柄和内部减压阀,通过限制供气压力来自动防止弹性体过载。
在实际工业应用中,该系统可与汽车数据生态系统或先进的物流搬送机器人协同工作。例如,在要求每分钟进行 120 次高速捡拾与放置(Pick and Place)的分拣线上,真空开关能实时监测当前的压力值,以维持最佳的抓取力。通过这种方式,即使在多轴机器人手臂急加速、急减速的环境下,也能准确地将克罗桑面包(牛角包)或鸡肉等易滑且异形的搬送对象放置到传送带上,且不会发生掉落,从而减轻了操作人员的监控负担。

共享应用数据与运行可靠性
除了提供硬件设备外,官方还通过集成了实际验证数据的视频平台,向用户公开了 100 多个具体的应用案例。用户可以参考针对不同工业领域和工件物理特性优化后的设置参数,从而缩短设计独立搬送系统时的实证实验周期。
由于控制模块具备独立运行(Standalone)功能,因此可以轻松集成到现有的生产线或企业自制的机械手爪中。将机械磨损部件降至最低的弹性体结构,与自动减压功能相结合,确保了系统在长期连续运转时依然拥有高稼动率和高可靠性。

补充背景信息:
本节详细说明了原始产品发布中未包含的技术规格及竞争对手基准测试。
在软体机器人市场中,该气动手指抓手系统与 Soft Robotics 公司的“mGrip”系列(包括施迈茨进行技术整合的产品)、费斯托(Festo)的仿生搬送解决方案(Bionic Handling Solutions)以及丹麦 OnRobot 的软体抓手展开直接竞争。
作为衡量竞争产品的技术评估标准,主要包括气动抓取力控制的响应速度,以及更换模块时的重复精度。OnRobot 的硅胶软体抓手通过使用三种可更换的硅胶杯来应对食品加工需求,但在最大可抓取重量以及对工件直径尺寸的柔性适应上往往受到限制。相比之下,本产品由于可以在基板上物理滑动调整手指模块的安装位置,因此对不同外径的包装产品具有更宽的适配范围。
此外,与 Festo 开发的手指顺应型柔性抓手相比,该系统在每分钟 120 次的高频往复运动中表现出更优异的耐久性。Festo 的结构虽然能够重现复杂的三维动作,但在高速循环下常面临经年老化的问题;而本产品通过简化结构的模块化配置,并结合内部减压阀来缓解机械应力,从而抑制了连续运转时密封件的磨损,保持了稳定且长寿命的特性。
www.schmalz.com
共享应用数据与运行可靠性
除了提供硬件设备外,官方还通过集成了实际验证数据的视频平台,向用户公开了 100 多个具体的应用案例。用户可以参考针对不同工业领域和工件物理特性优化后的设置参数,从而缩短设计独立搬送系统时的实证实验周期。
由于控制模块具备独立运行(Standalone)功能,因此可以轻松集成到现有的生产线或企业自制的机械手爪中。将机械磨损部件降至最低的弹性体结构,与自动减压功能相结合,确保了系统在长期连续运转时依然拥有高稼动率和高可靠性。
补充背景信息:
本节详细说明了原始产品发布中未包含的技术规格及竞争对手基准测试。
在软体机器人市场中,该气动手指抓手系统与 Soft Robotics 公司的“mGrip”系列(包括施迈茨进行技术整合的产品)、费斯托(Festo)的仿生搬送解决方案(Bionic Handling Solutions)以及丹麦 OnRobot 的软体抓手展开直接竞争。
作为衡量竞争产品的技术评估标准,主要包括气动抓取力控制的响应速度,以及更换模块时的重复精度。OnRobot 的硅胶软体抓手通过使用三种可更换的硅胶杯来应对食品加工需求,但在最大可抓取重量以及对工件直径尺寸的柔性适应上往往受到限制。相比之下,本产品由于可以在基板上物理滑动调整手指模块的安装位置,因此对不同外径的包装产品具有更宽的适配范围。
此外,与 Festo 开发的手指顺应型柔性抓手相比,该系统在每分钟 120 次的高频往复运动中表现出更优异的耐久性。Festo 的结构虽然能够重现复杂的三维动作,但在高速循环下常面临经年老化的问题;而本产品通过简化结构的模块化配置,并结合内部减压阀来缓解机械应力,从而抑制了连续运转时密封件的磨损,保持了稳定且长寿命的特性。
www.schmalz.com
