
www.engineering-china.com
29
'26
Written on Modified on
面向卫生生产的智能储罐清洗
Alfa Laval推出自动化CIP技术,提高清洗覆盖率,同时减少用水和化学品消耗。
www.alfalaval.com
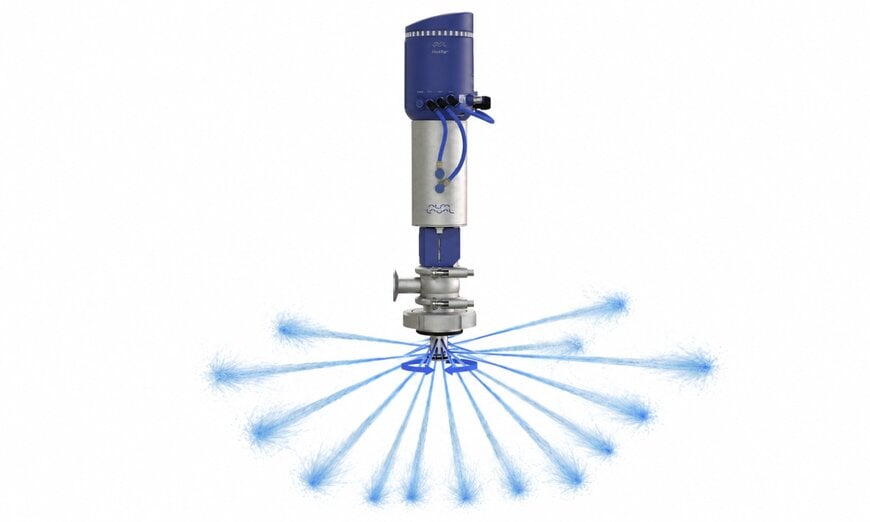
阿法拉伐已发布其受控旋转式伸缩清洗器(Controlled Rotating Retractors)。这是一系列高性能的原位清洗(CIP)设备,旨在有效清除卫生级加工行业中管道、管线、罐体和封闭区域内的残留物与污染物。该技术主要针对乳制品、食品、饮料、制药和生物技术领域中要求严苛的喷雾干燥及粉体生产应用。在这些行业中,难以触及 fam的表面如果清洗不彻底,会导致严重的污染风险和高昂的停机时间。
伸缩式原位清洗系统的机械原理
传统的静态喷淋球系统往往无法清除复杂加工生产线中的清洗死角(阴影区),从而导致产品损失并需要人工干预。新型旋转伸缩式清洗器解决了这一难题:在生产过程中,它们保持密封并与容器壁齐平,从而防止产品在清洗机构内积聚;在原位清洗(CIP)循环期间,清洗头延伸至容器内部,向所有内表面喷射动态流体喷射流。清洗循环结束后,清洗头完全收回,从而确保生产区域清洁且无污染,以便进行下一批次的生产。
资源效率与过程控制集成
运行数据表明,与传统的静态系统 compared,这些受控旋转设备提供的清洗效率最高可达两倍,同时可减少高达 55% 的水和化学介质消耗。由于延伸的喷射范围使每台设备能够覆盖更大的表面积,加工厂可以用更少的安装设备实现全面覆盖,从而降低了初始资本支出和随后的公用事业成本。
为了验证性能,该硬件直接与阿法拉伐 ThinkTop V70 传感与控制单元集成。这种集成实现了对延伸、旋转和收回循环的实时监测和自动化验证。自动化该反馈回路减少了人工检查的需求,最大程度地减少了人员接触强效清洗化学品的风险,并降低了操作停机时间。
从维护的角度来看,该系统使用了一种专门的单手操作工具,允许在不拆卸主要供应管的情况下拆除易损件。这一设计特性确保了伸缩清洗器在维护期间牢固锚定,简化了在密闭或高空空间中的维护工作流程,并缩短了数字供应链(digital supply chain)内的维护间隔。
附加背景
本节详细介绍了未包含在原始新闻发布中的技术规格和竞争基准测试。
在自动化的汽车数据生态系统(automotive data ecosystem)和更广泛的卫生工艺制造领域中,与成熟的伸缩式解决方案(如 GEA In-Line Sprayer IS 25 和 Lechler PopUp Whirly 系列)相比,该技术树立了鲜明的性能基准。GEA 依赖于标准的气动行程反馈,而 Lechler 采用自由旋转、流体驱动的机械结构(在可变压力下可能会发生停转),与此不同的是,阿法拉伐利用驱动气动执行器来强制执行精确、慢速控制的 400 度正反向清洗扫掠。该设备通过这种特意的分度机构和两个集成的调速节流阀实现差异化,并通过工业 digital 总线通信(如 AS-Interface 或 IO-Link)直接与 ThinkTop V70 控制头配对。这种对流体冲击和旋转参数的持续自动化验证,提供了标准的机械气动开关无法复制的可验证工艺追踪层。
由 Aishwarya Mambet(Induportals 编辑)编辑,在 AI 协助下完成。
www.alfalaval.com
